
Hello AI🤖!

I tried to run a sample of Shogi AI using Python, Chainer, and Docker.
Chainer is a framework for deep learning born in Japan. Developed by Preferred Network, Inc.
The book I referred to this time is “Deep Learning Learned with Shogi AI” (Mynavi Publishing). I put the link at the end.
It will be the installation environment.
| CPU | x64 instruction compatible 64-bit CPU |
| GPU | NVIDIA Geforce GTX 1060 |
| OS | Host: CentOS 7, Guest: Ubuntu16, Shogisho: Windows 10 Pro |
The software version.
| Software name | version |
| Anaconda | Anaconda 3.8.3.0 (64bit) |
| Python | 3.8.3 |
| Cupy | 7.7.0 |
| Chainer | 7.7.0 |
| Docker | 19.03.12 |
This time, we performed deep learning using a neural network called a policy network.
The point was to connect to the host GPU from the guest Ubuntu on Docker. The following is the place where I confirmed the operation of the host GPU on the guest Ubuntu. Learning time can be shortened by using GPU.
$ nvidia-smi
Mon Aug 10 01:39:27 2020
+-----------------------------------------------------------------------------+
| NVIDIA-SMI 450.57 Driver Version: 450.57 CUDA Version: 11.0 |
|-------------------------------+----------------------+----------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|===============================+======================+======================|
| 0 GeForce GTX 106... Off | 00000000:01:00.0 On | N/A |
| 0% 52C P8 12W / 120W | 505MiB / 3016MiB | 0% Default |
| | | N/A |
+-------------------------------+----------------------+----------------------+
+-----------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=============================================================================|
| 0 N/A N/A 1562 G /usr/bin/X 227MiB |
| 0 N/A N/A 2155 G /usr/bin/gnome-shell 87MiB |
| 0 N/A N/A 2924 G ...AAAAAAAAA= --shared-files 184MiB |
+-----------------------------------------------------------------------------+
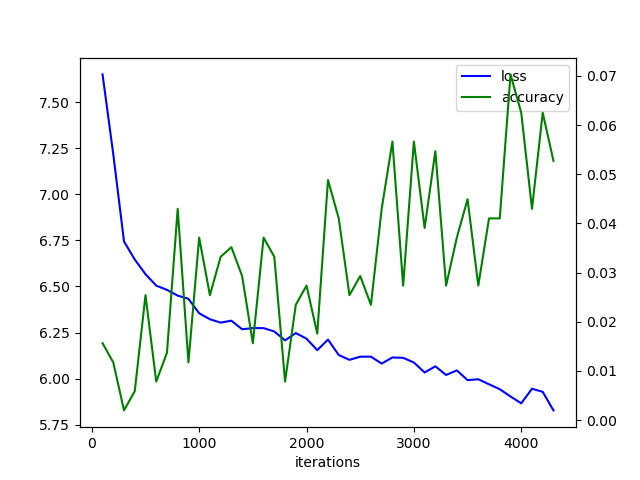
After confirming that the GPU can be used, I actually used Chainer to learn the game record. First, it is the training data created with 1000 training data game records and 100 test data game records.
2020/08/11 12:35:33 INFO read kifu start
2020/08/11 12:35:34 INFO load train pickle
2020/08/11 12:35:34 INFO load test pickle
2020/08/11 12:35:34 INFO read kifu end
2020/08/11 12:35:34 INFO train position num = 139865
2020/08/11 12:35:34 INFO test position num = 14217
2020/08/11 12:35:34 INFO start training
2020/08/11 12:35:38 INFO epoch = 1, iteration = 100, loss = 7.650593, accuracy = 0.015625
2020/08/11 12:35:41 INFO epoch = 1, iteration = 200, loss = 7.2174034, accuracy = 0.01171875
2020/08/11 12:35:44 INFO epoch = 1, iteration = 300, loss = 6.744217, accuracy = 0.001953125
2020/08/11 12:35:47 INFO epoch = 1, iteration = 400, loss = 6.6463594, accuracy = 0.005859375
2020/08/11 12:35:50 INFO epoch = 1, iteration = 500, loss = 6.5667987, accuracy = 0.025390625
2020/08/11 12:35:53 INFO epoch = 1, iteration = 600, loss = 6.5046926, accuracy = 0.0078125
2020/08/11 12:35:56 INFO epoch = 1, iteration = 700, loss = 6.4815917, accuracy = 0.013671875
2020/08/11 12:35:59 INFO epoch = 1, iteration = 800, loss = 6.450376, accuracy = 0.04296875
2020/08/11 12:36:02 INFO epoch = 1, iteration = 900, loss = 6.433092, accuracy = 0.01171875
:
I made a graph of the result. loss is the loss, and accuracy is the match rate with the test data. Loss is down and accuracy is up.
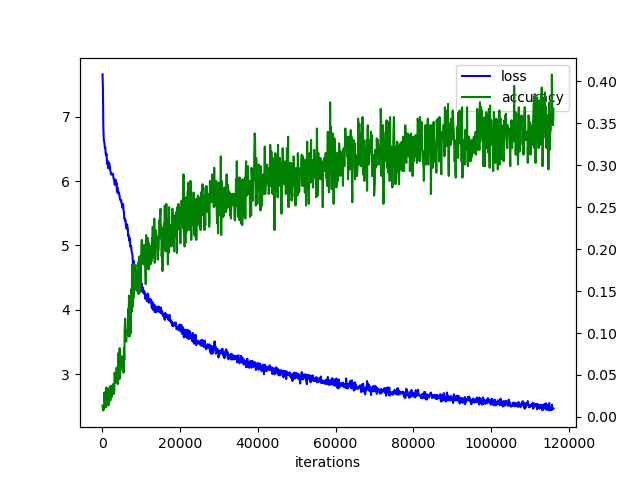
Next, it is the result of learning by creating training data and test data from 80,141 game record data in 2016.
2020/08/11 12:44:43 INFO read kifu start
2020/08/11 12:45:17 INFO load train pickle
2020/08/11 12:45:19 INFO load test pickle
2020/08/11 12:45:19 INFO read kifu end
2020/08/11 12:45:19 INFO train position num = 3712656
2020/08/11 12:45:19 INFO test position num = 413188
2020/08/11 12:45:19 INFO start training
2020/08/11 12:45:27 INFO epoch = 1, iteration = 100, loss = 7.6596613, accuracy = 0.013671875
2020/08/11 12:45:30 INFO epoch = 1, iteration = 200, loss = 7.4310913, accuracy = 0.0078125
2020/08/11 12:45:33 INFO epoch = 1, iteration = 300, loss = 6.857481, accuracy = 0.0078125
2020/08/11 12:45:36 INFO epoch = 1, iteration = 400, loss = 6.6683636, accuracy = 0.013671875
2020/08/11 12:45:39 INFO epoch = 1, iteration = 500, loss = 6.6142497, accuracy = 0.009765625
2020/08/11 12:45:42 INFO epoch = 1, iteration = 600, loss = 6.5848265, accuracy = 0.029296875
2020/08/11 12:45:45 INFO epoch = 1, iteration = 700, loss = 6.5157375, accuracy = 0.017578125
2020/08/11 12:45:48 INFO epoch = 1, iteration = 800, loss = 6.528902, accuracy = 0.0234375
2020/08/11 12:45:51 INFO epoch = 1, iteration = 900, loss = 6.433339, accuracy = 0.013671875
:
I made a graph in the same way.
Incorporate the learned policy network into the software of Shogisho.

That’s all for today. In the future, I would like to try which method is stronger by using deep learning such as policy network, value network, and Monte Carlo tree search.
Eventually, I hope it can be applied to the control of “RC model DE automatic driving”!

